使用 YOLOV8 和 KerasCV 进行高效目标检测
作者: Gitesh Chawda
创建日期 2023/06/26
最后修改日期 2023/06/26
描述: 使用 KerasCV 训练自定义 YOLOV8 目标检测模型。

引言
KerasCV 是 Keras 的一个扩展库,用于计算机视觉任务。在本示例中,我们将看到如何使用 KerasCV 训练 YOLOV8 目标检测模型。
KerasCV 包含适用于 ImageNet、COCO 和 Pascal VOC 等常用计算机视觉数据集的预训练模型,这些模型可用于迁移学习。KerasCV 还提供了一系列可视化工具,用于检查模型学到的中间表示以及可视化目标检测和分割任务的结果。
如果您对使用 KerasCV 进行目标检测感兴趣,强烈建议您查阅 lukewood 创建的指南。该资源可在 使用 KerasCV 进行目标检测 找到,它全面概述了使用 KerasCV 构建目标检测模型所需的基本概念和技术。
!pip install --upgrade git+https://github.com/keras-team/keras-cv -q
[33mWARNING: Running pip as the 'root' user can result in broken permissions and conflicting behaviour with the system package manager. It is recommended to use a virtual environment instead: https://pip.pypa.org.cn/warnings/venv[0m[33m
[0m
设置
import os
from tqdm.auto import tqdm
import xml.etree.ElementTree as ET
import tensorflow as tf
from tensorflow import keras
import keras_cv
from keras_cv import bounding_box
from keras_cv import visualization
/opt/conda/lib/python3.10/site-packages/tensorflow_io/python/ops/__init__.py:98: UserWarning: unable to load libtensorflow_io_plugins.so: unable to open file: libtensorflow_io_plugins.so, from paths: ['/opt/conda/lib/python3.10/site-packages/tensorflow_io/python/ops/libtensorflow_io_plugins.so']
caused by: ['/opt/conda/lib/python3.10/site-packages/tensorflow_io/python/ops/libtensorflow_io_plugins.so: undefined symbol: _ZN3tsl6StatusC1EN10tensorflow5error4CodeESt17basic_string_viewIcSt11char_traitsIcEENS_14SourceLocationE']
warnings.warn(f"unable to load libtensorflow_io_plugins.so: {e}")
/opt/conda/lib/python3.10/site-packages/tensorflow_io/python/ops/__init__.py:104: UserWarning: file system plugins are not loaded: unable to open file: libtensorflow_io.so, from paths: ['/opt/conda/lib/python3.10/site-packages/tensorflow_io/python/ops/libtensorflow_io.so']
caused by: ['/opt/conda/lib/python3.10/site-packages/tensorflow_io/python/ops/libtensorflow_io.so: undefined symbol: _ZTVN10tensorflow13GcsFileSystemE']
warnings.warn(f"file system plugins are not loaded: {e}")
加载数据
在本指南中,我们将使用从 roboflow 获取的自动驾驶汽车数据集。为了使数据集更易于管理,我从原始包含 15,000 个数据样本的较大数据集中提取了一个子集。从这个子集中,我选择了 7,316 个样本用于模型训练。
为了简化手头的任务并集中精力,我们将处理较少数量的目标类别。具体来说,我们将考虑五个主要类别进行检测和分类:汽车(car)、行人(pedestrian)、交通灯(traffic light)、骑行者(biker)和卡车(truck)。这些类别代表了在自动驾驶汽车场景中遇到的一些最常见和重要的目标。
通过将数据集缩小到这些特定类别,我们可以专注于构建一个强大的目标检测模型,该模型能够准确地识别和分类这些重要目标。
TensorFlow Datasets 库提供了一种便捷的方式来下载和使用各种数据集,包括目标检测数据集。对于那些希望快速开始使用数据而无需手动下载和预处理的用户来说,这是一个很好的选择。
您可以在此处查看各种目标检测数据集:TensorFlow Datasets
然而,在此代码示例中,我们将演示如何使用 TensorFlow 的 tf.data pipeline 从头开始加载数据集。这种方法提供了更大的灵活性,并允许您根据需要自定义预处理步骤。
使用 tf.data pipeline 的主要优点之一是能够加载 TensorFlow Datasets 库中不可用的自定义数据集。这种方法允许您创建针对特定数据集需求和要求的自定义数据预处理流程。
超参数
SPLIT_RATIO = 0.2
BATCH_SIZE = 4
LEARNING_RATE = 0.001
EPOCH = 5
GLOBAL_CLIPNORM = 10.0
创建一个字典,将每个类别名称映射到一个唯一的数字标识符。此映射用于在目标检测任务的训练和推理过程中对类别标签进行编码和解码。
class_ids = [
"car",
"pedestrian",
"trafficLight",
"biker",
"truck",
]
class_mapping = dict(zip(range(len(class_ids)), class_ids))
# Path to images and annotations
path_images = "/kaggle/input/dataset/data/images/"
path_annot = "/kaggle/input/dataset/data/annotations/"
# Get all XML file paths in path_annot and sort them
xml_files = sorted(
[
os.path.join(path_annot, file_name)
for file_name in os.listdir(path_annot)
if file_name.endswith(".xml")
]
)
# Get all JPEG image file paths in path_images and sort them
jpg_files = sorted(
[
os.path.join(path_images, file_name)
for file_name in os.listdir(path_images)
if file_name.endswith(".jpg")
]
)
下面的函数读取 XML 文件,查找图像名称和路径,然后遍历 XML 文件中的每个对象,提取每个对象的边界框坐标和类别标签。
该函数返回三个值:图像路径、边界框列表(每个边界框表示为四个浮点数的列表:xmin、ymin、xmax、ymax)以及与每个边界框对应的类别 ID 列表(表示为整数)。类别 ID 是通过使用名为 class_mapping 的字典将类别标签映射到整数值获得的。
def parse_annotation(xml_file):
tree = ET.parse(xml_file)
root = tree.getroot()
image_name = root.find("filename").text
image_path = os.path.join(path_images, image_name)
boxes = []
classes = []
for obj in root.iter("object"):
cls = obj.find("name").text
classes.append(cls)
bbox = obj.find("bndbox")
xmin = float(bbox.find("xmin").text)
ymin = float(bbox.find("ymin").text)
xmax = float(bbox.find("xmax").text)
ymax = float(bbox.find("ymax").text)
boxes.append([xmin, ymin, xmax, ymax])
class_ids = [
list(class_mapping.keys())[list(class_mapping.values()).index(cls)]
for cls in classes
]
return image_path, boxes, class_ids
image_paths = []
bbox = []
classes = []
for xml_file in tqdm(xml_files):
image_path, boxes, class_ids = parse_annotation(xml_file)
image_paths.append(image_path)
bbox.append(boxes)
classes.append(class_ids)
0%| | 0/7316 [00:00<?, ?it/s]
这里我们使用 tf.ragged.constant 从 bbox 和 classes 列表中创建不规则张量(ragged tensors)。不规则张量是一种可以处理一个或多个维度上变长数据的张量。这在处理变长序列数据(如文本或时间序列数据)时非常有用。
classes = [
[8, 8, 8, 8, 8], # 5 classes
[12, 14, 14, 14], # 4 classes
[1], # 1 class
[7, 7], # 2 classes
...]
bbox = [
[[199.0, 19.0, 390.0, 401.0],
[217.0, 15.0, 270.0, 157.0],
[393.0, 18.0, 432.0, 162.0],
[1.0, 15.0, 226.0, 276.0],
[19.0, 95.0, 458.0, 443.0]], #image 1 has 4 objects
[[52.0, 117.0, 109.0, 177.0]], #image 2 has 1 object
[[88.0, 87.0, 235.0, 322.0],
[113.0, 117.0, 218.0, 471.0]], #image 3 has 2 objects
...]
在本例中,bbox 和 classes 列表对于每张图像的长度是不同的,具体取决于图像中的对象数量以及相应的边界框和类别。为了处理这种可变性,使用了不规则张量(ragged tensors)而不是常规张量。
随后,这些不规则张量被用于使用 from_tensor_slices 方法创建一个 tf.data.Dataset。此方法通过沿着第一维度切片输入张量来创建数据集。通过使用不规则张量,数据集可以处理每张图像中不同长度的数据,并为后续处理提供灵活的输入 pipeline。
bbox = tf.ragged.constant(bbox)
classes = tf.ragged.constant(classes)
image_paths = tf.ragged.constant(image_paths)
data = tf.data.Dataset.from_tensor_slices((image_paths, classes, bbox))
划分训练数据和验证数据
# Determine the number of validation samples
num_val = int(len(xml_files) * SPLIT_RATIO)
# Split the dataset into train and validation sets
val_data = data.take(num_val)
train_data = data.skip(num_val)
接下来我们看看数据加载和边界框格式化以开始。KerasCV 中的边界框有一种预定的格式。为此,您必须将边界框打包成一个符合以下要求的字典:
bounding_boxes = {
# num_boxes may be a Ragged dimension
'boxes': Tensor(shape=[batch, num_boxes, 4]),
'classes': Tensor(shape=[batch, num_boxes])
}
该字典有两个键,'boxes' 和 'classes',每个键都映射到一个 TensorFlow RaggedTensor 或 Tensor 对象。'boxes' Tensor 的形状为 [batch, num_boxes, 4],其中 batch 是批次中的图像数量,num_boxes 是任意图像中的最大边界框数量。4 代表定义边界框所需的四个值:xmin、ymin、xmax、ymax。
'classes' Tensor 的形状为 [batch, num_boxes],其中每个元素代表 'boxes' Tensor 中相应边界框的类别标签。num_boxes 维度可能是不规则的(ragged),这意味着批次中图像的边界框数量可能不同。
最终字典应为
{"images": images, "bounding_boxes": bounding_boxes}
def load_image(image_path):
image = tf.io.read_file(image_path)
image = tf.image.decode_jpeg(image, channels=3)
return image
def load_dataset(image_path, classes, bbox):
# Read Image
image = load_image(image_path)
bounding_boxes = {
"classes": tf.cast(classes, dtype=tf.float32),
"boxes": bbox,
}
return {"images": tf.cast(image, tf.float32), "bounding_boxes": bounding_boxes}
这里我们创建一个层,将图像大小调整为 640x640 像素,同时保持原始纵横比。与图像关联的边界框采用 xyxy 格式指定。如有必要,将对调整大小后的图像进行零填充以保持原始纵横比。
KerasCV 支持的边界框格式:1. CENTER_XYWH 2. XYWH 3. XYXY 4. REL_XYXY 5. REL_XYWH 6. YXYX 7. REL_YXYX
您可以在文档中阅读更多关于 KerasCV 边界框格式的信息。
此外,可以在任意两种格式之间执行格式转换。
boxes = keras_cv.bounding_box.convert_format(
bounding_box,
images=image,
source="xyxy", # Original Format
target="xywh", # Target Format (to which we want to convert)
)
数据增强
构建目标检测 pipeline 时最具挑战性的任务之一是数据增强。它涉及对输入图像应用各种变换,以增加训练数据的多样性并提高模型的泛化能力。然而,在处理目标检测任务时,这变得更加复杂,因为这些变换需要知道底层的边界框并相应地更新它们。
KerasCV 为边界框增强提供了原生支持。KerasCV 提供了一系列专门为处理边界框而设计的数据增强层。这些层会智能地调整边界框坐标,随着图像进行变换,确保边界框与增强后的图像保持准确和对齐。
通过利用 KerasCV 的功能,开发者可以方便地将对边界框友好的数据增强集成到他们的目标检测 pipeline 中。通过在 tf.data pipeline 中执行即时增强,过程变得无缝且高效,从而实现更好的训练和更准确的目标检测结果。
augmenter = keras.Sequential(
layers=[
keras_cv.layers.RandomFlip(mode="horizontal", bounding_box_format="xyxy"),
keras_cv.layers.RandomShear(
x_factor=0.2, y_factor=0.2, bounding_box_format="xyxy"
),
keras_cv.layers.JitteredResize(
target_size=(640, 640), scale_factor=(0.75, 1.3), bounding_box_format="xyxy"
),
]
)
创建训练数据集
train_ds = train_data.map(load_dataset, num_parallel_calls=tf.data.AUTOTUNE)
train_ds = train_ds.shuffle(BATCH_SIZE * 4)
train_ds = train_ds.ragged_batch(BATCH_SIZE, drop_remainder=True)
train_ds = train_ds.map(augmenter, num_parallel_calls=tf.data.AUTOTUNE)
创建验证数据集
resizing = keras_cv.layers.JitteredResize(
target_size=(640, 640),
scale_factor=(0.75, 1.3),
bounding_box_format="xyxy",
)
val_ds = val_data.map(load_dataset, num_parallel_calls=tf.data.AUTOTUNE)
val_ds = val_ds.shuffle(BATCH_SIZE * 4)
val_ds = val_ds.ragged_batch(BATCH_SIZE, drop_remainder=True)
val_ds = val_ds.map(resizing, num_parallel_calls=tf.data.AUTOTUNE)
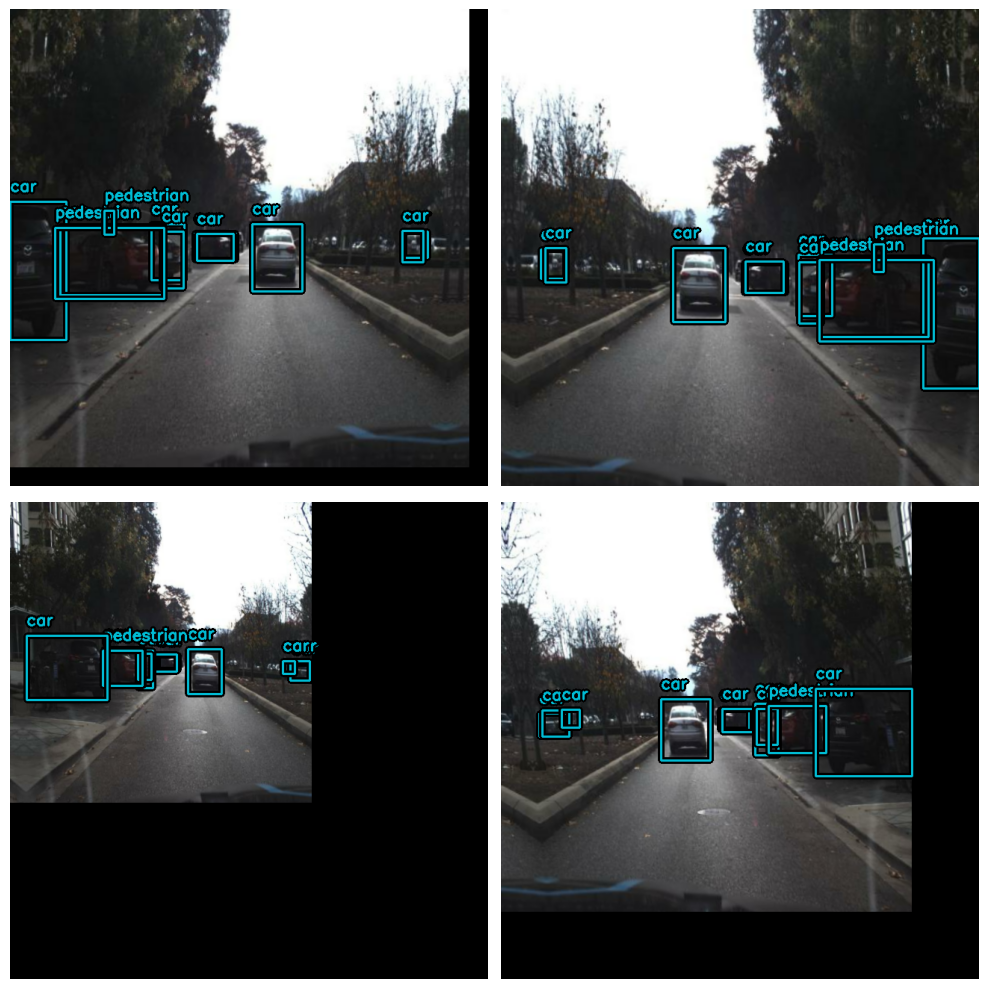
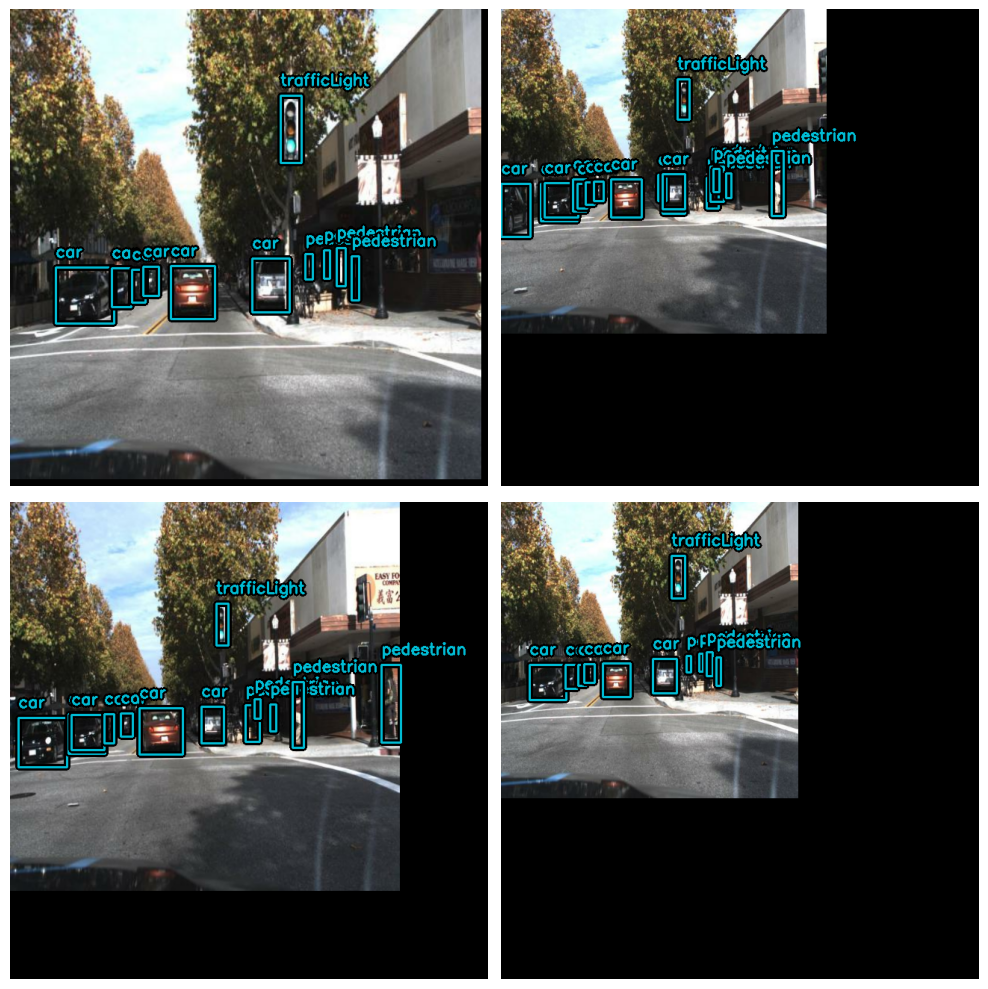
可视化
def visualize_dataset(inputs, value_range, rows, cols, bounding_box_format):
inputs = next(iter(inputs.take(1)))
images, bounding_boxes = inputs["images"], inputs["bounding_boxes"]
visualization.plot_bounding_box_gallery(
images,
value_range=value_range,
rows=rows,
cols=cols,
y_true=bounding_boxes,
scale=5,
font_scale=0.7,
bounding_box_format=bounding_box_format,
class_mapping=class_mapping,
)
visualize_dataset(
train_ds, bounding_box_format="xyxy", value_range=(0, 255), rows=2, cols=2
)
visualize_dataset(
val_ds, bounding_box_format="xyxy", value_range=(0, 255), rows=2, cols=2
)
我们需要从预处理字典中提取输入,并准备好将它们馈送到模型中。
def dict_to_tuple(inputs):
return inputs["images"], inputs["bounding_boxes"]
train_ds = train_ds.map(dict_to_tuple, num_parallel_calls=tf.data.AUTOTUNE)
train_ds = train_ds.prefetch(tf.data.AUTOTUNE)
val_ds = val_ds.map(dict_to_tuple, num_parallel_calls=tf.data.AUTOTUNE)
val_ds = val_ds.prefetch(tf.data.AUTOTUNE)
创建模型
YOLOv8 是一款尖端的 YOLO 模型,用于各种计算机视觉任务,如目标检测、图像分类和实例分割。YOLOv5 的创建者 Ultralytics 也开发了 YOLOv8,它与其前身相比,在架构和开发者体验方面包含了许多改进和变化。YOLOv8 是业界高度认可的最新最先进模型。
下表比较了五种不同尺寸(以像素为单位)的 YOLOv8 模型的性能指标:YOLOv8n、YOLOv8s、YOLOv8m、YOLOv8l 和 YOLOv8x。这些指标包括验证数据在不同交并比(IoU)阈值下的平均精度(mAP)值,在 ONNX 格式和 A100 TensorRT 下 CPU 上的推理速度,参数数量,以及浮点运算次数(FLOPs)(分别以百万和十亿为单位)。随着模型尺寸的增加,mAP、参数和 FLOPs 通常会增加,而速度会降低。YOLOv8x 具有最高的 mAP、参数和 FLOPs,但推理速度最慢,而 YOLOv8n 尺寸最小,推理速度最快,mAP、参数和 FLOPs 最低。
| 模型 | 尺寸
(像素) | mAPval
50-95 | 速度
CPU ONNX
(毫秒) | 速度
A100 TensorRT
(毫秒) | 参数
(百万) | FLOPs
(十亿) | | ------------------------------------------------------------------------------------ | --------------------- | -------------------- | ------------------------------ | ----------------------------------- | ------------------ | ----------------- | | YOLOv8n | 640 | 37.3 | 80.4 | 0.99 | 3.2 | 8.7 | | YOLOv8s | 640 | 44.9 | 128.4 | 1.20 | 11.2 | 28.6 | | YOLOv8m | 640 | 50.2 | 234.7 | 1.83 | 25.9 | 78.9 | | YOLOv8l | 640 | 52.9 | 375.2 | 2.39 | 43.7 | 165.2 | | YOLOv8x | 640 | 53.9 | 479.1 | 3.53 | 68.2 | 257.8 |
您可以在这篇 RoboFlow 博客 中阅读更多关于 YOLOV8 及其架构的信息。
首先,我们将创建一个 backbone 实例,该实例将由我们的 yolov8 detector 类使用。
KerasCV 中可用的 YOLOV8 Backbones
- 无权重
1. yolo_v8_xs_backbone
2. yolo_v8_s_backbone
3. yolo_v8_m_backbone
4. yolo_v8_l_backbone
5. yolo_v8_xl_backbone
- 使用 COCO 预训练权重
backbone = keras_cv.models.YOLOV8Backbone.from_preset(
"yolo_v8_s_backbone_coco" # We will use yolov8 small backbone with coco weights
)
1. yolo_v8_xs_backbone_coco
2. yolo_v8_s_backbone_coco
2. yolo_v8_m_backbone_coco
2. yolo_v8_l_backbone_coco
2. yolo_v8_xl_backbone_coco
Downloading data from https://storage.googleapis.com/keras-cv/models/yolov8/coco/yolov8_s_backbone.h5
20596968/20596968 [==============================] - 0s 0us/step
接下来,我们使用 YOLOV8Detector 构建一个 YOLOV8 模型,它接受一个 feature extractor 作为 backbone 参数,一个指定基于 class_mapping 列表大小的目标类别数量的 num_classes 参数,一个告知模型数据集中 bbox 格式的 bounding_box_format 参数,最后,特征金字塔网络(FPN)深度由 fpn_depth 参数指定。
借助 KerasCV,使用上述任何 backbone 构建 YOLOV8 模型都很简单。
yolo = keras_cv.models.YOLOV8Detector(
num_classes=len(class_mapping),
bounding_box_format="xyxy",
backbone=backbone,
fpn_depth=1,
)
编译模型
YOLOV8 使用的损失函数
-
分类损失:此损失函数计算预期类别概率与实际类别概率之间的差异。在此示例中,使用了
binary_crossentropy,这是处理二分类问题的常用方案。我们使用 binary crossentropy 是因为每个被识别的事物都被归类为属于或不属于某个特定对象类别(例如人、汽车等)。 -
框损失:
box_loss是用于衡量预测边界框与真实值之间差异的损失函数。在此情况下,使用了 Complete IoU (CIoU) 度量,它不仅测量预测边界框与真实边界框之间的重叠,还考虑了纵横比、中心距离和框尺寸的差异。这些损失函数共同作用,通过最小化预测类别概率和边界框与真实值之间的差异来优化目标检测模型。
optimizer = tf.keras.optimizers.Adam(
learning_rate=LEARNING_RATE,
global_clipnorm=GLOBAL_CLIPNORM,
)
yolo.compile(
optimizer=optimizer, classification_loss="binary_crossentropy", box_loss="ciou"
)
COCO 指标回调
我们将使用 KerasCV 中的 BoxCOCOMetrics 来评估模型并计算 Map(平均精度)分数、Recall(召回率)和 Precision(精确率)。当 mAP 分数提高时,我们也会保存模型。
class EvaluateCOCOMetricsCallback(keras.callbacks.Callback):
def __init__(self, data, save_path):
super().__init__()
self.data = data
self.metrics = keras_cv.metrics.BoxCOCOMetrics(
bounding_box_format="xyxy",
evaluate_freq=1e9,
)
self.save_path = save_path
self.best_map = -1.0
def on_epoch_end(self, epoch, logs):
self.metrics.reset_state()
for batch in self.data:
images, y_true = batch[0], batch[1]
y_pred = self.model.predict(images, verbose=0)
self.metrics.update_state(y_true, y_pred)
metrics = self.metrics.result(force=True)
logs.update(metrics)
current_map = metrics["MaP"]
if current_map > self.best_map:
self.best_map = current_map
self.model.save(self.save_path) # Save the model when mAP improves
return logs
训练模型
yolo.fit(
train_ds,
validation_data=val_ds,
epochs=3,
callbacks=[EvaluateCOCOMetricsCallback(val_ds, "model.h5")],
)
Epoch 1/3
1463/1463 [==============================] - 633s 390ms/step - loss: 10.1535 - box_loss: 2.5659 - class_loss: 7.5876 - val_loss: 3.9852 - val_box_loss: 3.1973 - val_class_loss: 0.7879 - MaP: 0.0095 - MaP@[IoU=50]: 0.0193 - MaP@[IoU=75]: 0.0074 - MaP@[area=small]: 0.0021 - MaP@[area=medium]: 0.0164 - MaP@[area=large]: 0.0010 - Recall@[max_detections=1]: 0.0096 - Recall@[max_detections=10]: 0.0160 - Recall@[max_detections=100]: 0.0160 - Recall@[area=small]: 0.0034 - Recall@[area=medium]: 0.0283 - Recall@[area=large]: 0.0010
Epoch 2/3
1463/1463 [==============================] - 554s 378ms/step - loss: 2.6961 - box_loss: 2.2861 - class_loss: 0.4100 - val_loss: 3.8292 - val_box_loss: 3.0052 - val_class_loss: 0.8240 - MaP: 0.0077 - MaP@[IoU=50]: 0.0197 - MaP@[IoU=75]: 0.0043 - MaP@[area=small]: 0.0075 - MaP@[area=medium]: 0.0126 - MaP@[area=large]: 0.0050 - Recall@[max_detections=1]: 0.0088 - Recall@[max_detections=10]: 0.0154 - Recall@[max_detections=100]: 0.0154 - Recall@[area=small]: 0.0075 - Recall@[area=medium]: 0.0191 - Recall@[area=large]: 0.0280
Epoch 3/3
1463/1463 [==============================] - 558s 381ms/step - loss: 2.5930 - box_loss: 2.2018 - class_loss: 0.3912 - val_loss: 3.4796 - val_box_loss: 2.8472 - val_class_loss: 0.6323 - MaP: 0.0145 - MaP@[IoU=50]: 0.0398 - MaP@[IoU=75]: 0.0072 - MaP@[area=small]: 0.0077 - MaP@[area=medium]: 0.0227 - MaP@[area=large]: 0.0079 - Recall@[max_detections=1]: 0.0120 - Recall@[max_detections=10]: 0.0257 - Recall@[max_detections=100]: 0.0258 - Recall@[area=small]: 0.0093 - Recall@[area=medium]: 0.0396 - Recall@[area=large]: 0.0226
<keras.callbacks.History at 0x7f3e01ca6d70>
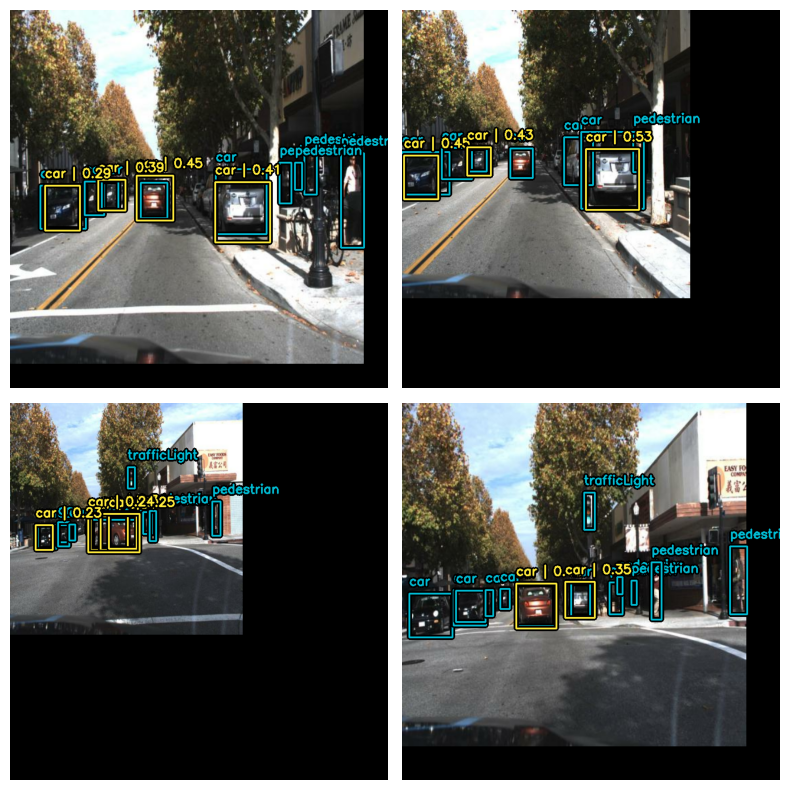
可视化预测结果
def visualize_detections(model, dataset, bounding_box_format):
images, y_true = next(iter(dataset.take(1)))
y_pred = model.predict(images)
y_pred = bounding_box.to_ragged(y_pred)
visualization.plot_bounding_box_gallery(
images,
value_range=(0, 255),
bounding_box_format=bounding_box_format,
y_true=y_true,
y_pred=y_pred,
scale=4,
rows=2,
cols=2,
show=True,
font_scale=0.7,
class_mapping=class_mapping,
)
visualize_detections(yolo, dataset=val_ds, bounding_box_format="xyxy")
1/1 [==============================] - 0s 115ms/step