使用 RetinaNet 进行目标检测
作者: Srihari Humbarwadi
创建日期 2020/05/17
最后修改日期 2023/07/10
描述: 实现 RetinaNet:用于密集目标检测的 Focal Loss。

引言
目标检测是计算机视觉中一个非常重要的问题。在此,模型的任务是定位图像中存在的对象,同时将其分类到不同类别中。目标检测模型大致可分为“单阶段”和“两阶段”检测器。两阶段检测器通常更准确,但代价是速度较慢。在本示例中,我们将实现 RetinaNet,这是一种流行的单阶段检测器,它既准确又运行快速。RetinaNet 使用特征金字塔网络高效地检测多尺度对象,并引入了一种新的损失函数——Focal Loss 函数,以缓解前景背景类别极端不平衡的问题。
参考文献
import os
import re
import zipfile
import numpy as np
import tensorflow as tf
from tensorflow import keras
import matplotlib.pyplot as plt
import tensorflow_datasets as tfds
下载 COCO2017 数据集
在拥有约 11.8 万张图像的整个 COCO2017 数据集上进行训练需要很长时间,因此在本示例中,我们将使用一个包含约 500 张图像的较小子集进行训练。
url = "https://github.com/srihari-humbarwadi/datasets/releases/download/v0.1.0/data.zip"
filename = os.path.join(os.getcwd(), "data.zip")
keras.utils.get_file(filename, url)
with zipfile.ZipFile("data.zip", "r") as z_fp:
z_fp.extractall("./")
Downloading data from https://github.com/srihari-humbarwadi/datasets/releases/download/v0.1.0/data.zip
560529408/560525318 [==============================] - 7s 0us/step
560537600/560525318 [==============================] - 7s 0us/step
实现工具函数
边界框可以用多种方式表示,最常见的格式是
- 存储角点坐标
[xmin, ymin, xmax, ymax] - 存储中心点坐标和框尺寸
[x, y, width, height]
由于我们需要这两种格式,因此我们将实现函数用于在它们之间进行转换。
def swap_xy(boxes):
"""Swaps order the of x and y coordinates of the boxes.
Arguments:
boxes: A tensor with shape `(num_boxes, 4)` representing bounding boxes.
Returns:
swapped boxes with shape same as that of boxes.
"""
return tf.stack([boxes[:, 1], boxes[:, 0], boxes[:, 3], boxes[:, 2]], axis=-1)
def convert_to_xywh(boxes):
"""Changes the box format to center, width and height.
Arguments:
boxes: A tensor of rank 2 or higher with a shape of `(..., num_boxes, 4)`
representing bounding boxes where each box is of the format
`[xmin, ymin, xmax, ymax]`.
Returns:
converted boxes with shape same as that of boxes.
"""
return tf.concat(
[(boxes[..., :2] + boxes[..., 2:]) / 2.0, boxes[..., 2:] - boxes[..., :2]],
axis=-1,
)
def convert_to_corners(boxes):
"""Changes the box format to corner coordinates
Arguments:
boxes: A tensor of rank 2 or higher with a shape of `(..., num_boxes, 4)`
representing bounding boxes where each box is of the format
`[x, y, width, height]`.
Returns:
converted boxes with shape same as that of boxes.
"""
return tf.concat(
[boxes[..., :2] - boxes[..., 2:] / 2.0, boxes[..., :2] + boxes[..., 2:] / 2.0],
axis=-1,
)
计算成对的 Intersection Over Union (IOU)
正如我们在示例后面会看到的,我们将根据重叠程度将 ground truth 框分配给 anchor 框。这需要我们计算所有 anchor 框和 ground truth 框对之间的 Intersection Over Union (IOU)。
def compute_iou(boxes1, boxes2):
"""Computes pairwise IOU matrix for given two sets of boxes
Arguments:
boxes1: A tensor with shape `(N, 4)` representing bounding boxes
where each box is of the format `[x, y, width, height]`.
boxes2: A tensor with shape `(M, 4)` representing bounding boxes
where each box is of the format `[x, y, width, height]`.
Returns:
pairwise IOU matrix with shape `(N, M)`, where the value at ith row
jth column holds the IOU between ith box and jth box from
boxes1 and boxes2 respectively.
"""
boxes1_corners = convert_to_corners(boxes1)
boxes2_corners = convert_to_corners(boxes2)
lu = tf.maximum(boxes1_corners[:, None, :2], boxes2_corners[:, :2])
rd = tf.minimum(boxes1_corners[:, None, 2:], boxes2_corners[:, 2:])
intersection = tf.maximum(0.0, rd - lu)
intersection_area = intersection[:, :, 0] * intersection[:, :, 1]
boxes1_area = boxes1[:, 2] * boxes1[:, 3]
boxes2_area = boxes2[:, 2] * boxes2[:, 3]
union_area = tf.maximum(
boxes1_area[:, None] + boxes2_area - intersection_area, 1e-8
)
return tf.clip_by_value(intersection_area / union_area, 0.0, 1.0)
def visualize_detections(
image, boxes, classes, scores, figsize=(7, 7), linewidth=1, color=[0, 0, 1]
):
"""Visualize Detections"""
image = np.array(image, dtype=np.uint8)
plt.figure(figsize=figsize)
plt.axis("off")
plt.imshow(image)
ax = plt.gca()
for box, _cls, score in zip(boxes, classes, scores):
text = "{}: {:.2f}".format(_cls, score)
x1, y1, x2, y2 = box
w, h = x2 - x1, y2 - y1
patch = plt.Rectangle(
[x1, y1], w, h, fill=False, edgecolor=color, linewidth=linewidth
)
ax.add_patch(patch)
ax.text(
x1,
y1,
text,
bbox={"facecolor": color, "alpha": 0.4},
clip_box=ax.clipbox,
clip_on=True,
)
plt.show()
return ax
实现 Anchor 生成器
Anchor 框是固定大小的框,模型使用它们来预测对象的边界框。它通过回归对象中心位置与 anchor 框中心之间的偏移量来实现这一点,然后使用 anchor 框的宽度和高度预测对象的相对尺度。在 RetinaNet 的情况下,给定特征图上的每个位置都有九个 anchor 框(三个尺度和三个长宽比)。
class AnchorBox:
"""Generates anchor boxes.
This class has operations to generate anchor boxes for feature maps at
strides `[8, 16, 32, 64, 128]`. Where each anchor each box is of the
format `[x, y, width, height]`.
Attributes:
aspect_ratios: A list of float values representing the aspect ratios of
the anchor boxes at each location on the feature map
scales: A list of float values representing the scale of the anchor boxes
at each location on the feature map.
num_anchors: The number of anchor boxes at each location on feature map
areas: A list of float values representing the areas of the anchor
boxes for each feature map in the feature pyramid.
strides: A list of float value representing the strides for each feature
map in the feature pyramid.
"""
def __init__(self):
self.aspect_ratios = [0.5, 1.0, 2.0]
self.scales = [2 ** x for x in [0, 1 / 3, 2 / 3]]
self._num_anchors = len(self.aspect_ratios) * len(self.scales)
self._strides = [2 ** i for i in range(3, 8)]
self._areas = [x ** 2 for x in [32.0, 64.0, 128.0, 256.0, 512.0]]
self._anchor_dims = self._compute_dims()
def _compute_dims(self):
"""Computes anchor box dimensions for all ratios and scales at all levels
of the feature pyramid.
"""
anchor_dims_all = []
for area in self._areas:
anchor_dims = []
for ratio in self.aspect_ratios:
anchor_height = tf.math.sqrt(area / ratio)
anchor_width = area / anchor_height
dims = tf.reshape(
tf.stack([anchor_width, anchor_height], axis=-1), [1, 1, 2]
)
for scale in self.scales:
anchor_dims.append(scale * dims)
anchor_dims_all.append(tf.stack(anchor_dims, axis=-2))
return anchor_dims_all
def _get_anchors(self, feature_height, feature_width, level):
"""Generates anchor boxes for a given feature map size and level
Arguments:
feature_height: An integer representing the height of the feature map.
feature_width: An integer representing the width of the feature map.
level: An integer representing the level of the feature map in the
feature pyramid.
Returns:
anchor boxes with the shape
`(feature_height * feature_width * num_anchors, 4)`
"""
rx = tf.range(feature_width, dtype=tf.float32) + 0.5
ry = tf.range(feature_height, dtype=tf.float32) + 0.5
centers = tf.stack(tf.meshgrid(rx, ry), axis=-1) * self._strides[level - 3]
centers = tf.expand_dims(centers, axis=-2)
centers = tf.tile(centers, [1, 1, self._num_anchors, 1])
dims = tf.tile(
self._anchor_dims[level - 3], [feature_height, feature_width, 1, 1]
)
anchors = tf.concat([centers, dims], axis=-1)
return tf.reshape(
anchors, [feature_height * feature_width * self._num_anchors, 4]
)
def get_anchors(self, image_height, image_width):
"""Generates anchor boxes for all the feature maps of the feature pyramid.
Arguments:
image_height: Height of the input image.
image_width: Width of the input image.
Returns:
anchor boxes for all the feature maps, stacked as a single tensor
with shape `(total_anchors, 4)`
"""
anchors = [
self._get_anchors(
tf.math.ceil(image_height / 2 ** i),
tf.math.ceil(image_width / 2 ** i),
i,
)
for i in range(3, 8)
]
return tf.concat(anchors, axis=0)
数据预处理
图像预处理包括两个步骤
- 调整图像大小:图像被调整大小,使得最短边等于 800 像素,调整大小后,如果图像的最长边超过 1333 像素,则将图像调整大小,使得最长边上限为 1333 像素。
- 应用数据增强:随机尺度抖动和随机水平翻转是应用于图像的唯一数据增强方法。
图像的同时,边界框也会根据需要进行缩放和翻转。
def random_flip_horizontal(image, boxes):
"""Flips image and boxes horizontally with 50% chance
Arguments:
image: A 3-D tensor of shape `(height, width, channels)` representing an
image.
boxes: A tensor with shape `(num_boxes, 4)` representing bounding boxes,
having normalized coordinates.
Returns:
Randomly flipped image and boxes
"""
if tf.random.uniform(()) > 0.5:
image = tf.image.flip_left_right(image)
boxes = tf.stack(
[1 - boxes[:, 2], boxes[:, 1], 1 - boxes[:, 0], boxes[:, 3]], axis=-1
)
return image, boxes
def resize_and_pad_image(
image, min_side=800.0, max_side=1333.0, jitter=[640, 1024], stride=128.0
):
"""Resizes and pads image while preserving aspect ratio.
1. Resizes images so that the shorter side is equal to `min_side`
2. If the longer side is greater than `max_side`, then resize the image
with longer side equal to `max_side`
3. Pad with zeros on right and bottom to make the image shape divisible by
`stride`
Arguments:
image: A 3-D tensor of shape `(height, width, channels)` representing an
image.
min_side: The shorter side of the image is resized to this value, if
`jitter` is set to None.
max_side: If the longer side of the image exceeds this value after
resizing, the image is resized such that the longer side now equals to
this value.
jitter: A list of floats containing minimum and maximum size for scale
jittering. If available, the shorter side of the image will be
resized to a random value in this range.
stride: The stride of the smallest feature map in the feature pyramid.
Can be calculated using `image_size / feature_map_size`.
Returns:
image: Resized and padded image.
image_shape: Shape of the image before padding.
ratio: The scaling factor used to resize the image
"""
image_shape = tf.cast(tf.shape(image)[:2], dtype=tf.float32)
if jitter is not None:
min_side = tf.random.uniform((), jitter[0], jitter[1], dtype=tf.float32)
ratio = min_side / tf.reduce_min(image_shape)
if ratio * tf.reduce_max(image_shape) > max_side:
ratio = max_side / tf.reduce_max(image_shape)
image_shape = ratio * image_shape
image = tf.image.resize(image, tf.cast(image_shape, dtype=tf.int32))
padded_image_shape = tf.cast(
tf.math.ceil(image_shape / stride) * stride, dtype=tf.int32
)
image = tf.image.pad_to_bounding_box(
image, 0, 0, padded_image_shape[0], padded_image_shape[1]
)
return image, image_shape, ratio
def preprocess_data(sample):
"""Applies preprocessing step to a single sample
Arguments:
sample: A dict representing a single training sample.
Returns:
image: Resized and padded image with random horizontal flipping applied.
bbox: Bounding boxes with the shape `(num_objects, 4)` where each box is
of the format `[x, y, width, height]`.
class_id: An tensor representing the class id of the objects, having
shape `(num_objects,)`.
"""
image = sample["image"]
bbox = swap_xy(sample["objects"]["bbox"])
class_id = tf.cast(sample["objects"]["label"], dtype=tf.int32)
image, bbox = random_flip_horizontal(image, bbox)
image, image_shape, _ = resize_and_pad_image(image)
bbox = tf.stack(
[
bbox[:, 0] * image_shape[1],
bbox[:, 1] * image_shape[0],
bbox[:, 2] * image_shape[1],
bbox[:, 3] * image_shape[0],
],
axis=-1,
)
bbox = convert_to_xywh(bbox)
return image, bbox, class_id
编码标签
原始标签,包括边界框和类别 ID,需要转换为用于训练的目标。此转换包括以下步骤
- 根据给定的图像尺寸生成 anchor 框
- 将 ground truth 框分配给 anchor 框
- 未被分配任何对象的 anchor 框,根据 IOU 将被分配为背景类别或被忽略
- 使用 anchor 框生成分类和回归目标
class LabelEncoder:
"""Transforms the raw labels into targets for training.
This class has operations to generate targets for a batch of samples which
is made up of the input images, bounding boxes for the objects present and
their class ids.
Attributes:
anchor_box: Anchor box generator to encode the bounding boxes.
box_variance: The scaling factors used to scale the bounding box targets.
"""
def __init__(self):
self._anchor_box = AnchorBox()
self._box_variance = tf.convert_to_tensor(
[0.1, 0.1, 0.2, 0.2], dtype=tf.float32
)
def _match_anchor_boxes(
self, anchor_boxes, gt_boxes, match_iou=0.5, ignore_iou=0.4
):
"""Matches ground truth boxes to anchor boxes based on IOU.
1. Calculates the pairwise IOU for the M `anchor_boxes` and N `gt_boxes`
to get a `(M, N)` shaped matrix.
2. The ground truth box with the maximum IOU in each row is assigned to
the anchor box provided the IOU is greater than `match_iou`.
3. If the maximum IOU in a row is less than `ignore_iou`, the anchor
box is assigned with the background class.
4. The remaining anchor boxes that do not have any class assigned are
ignored during training.
Arguments:
anchor_boxes: A float tensor with the shape `(total_anchors, 4)`
representing all the anchor boxes for a given input image shape,
where each anchor box is of the format `[x, y, width, height]`.
gt_boxes: A float tensor with shape `(num_objects, 4)` representing
the ground truth boxes, where each box is of the format
`[x, y, width, height]`.
match_iou: A float value representing the minimum IOU threshold for
determining if a ground truth box can be assigned to an anchor box.
ignore_iou: A float value representing the IOU threshold under which
an anchor box is assigned to the background class.
Returns:
matched_gt_idx: Index of the matched object
positive_mask: A mask for anchor boxes that have been assigned ground
truth boxes.
ignore_mask: A mask for anchor boxes that need to by ignored during
training
"""
iou_matrix = compute_iou(anchor_boxes, gt_boxes)
max_iou = tf.reduce_max(iou_matrix, axis=1)
matched_gt_idx = tf.argmax(iou_matrix, axis=1)
positive_mask = tf.greater_equal(max_iou, match_iou)
negative_mask = tf.less(max_iou, ignore_iou)
ignore_mask = tf.logical_not(tf.logical_or(positive_mask, negative_mask))
return (
matched_gt_idx,
tf.cast(positive_mask, dtype=tf.float32),
tf.cast(ignore_mask, dtype=tf.float32),
)
def _compute_box_target(self, anchor_boxes, matched_gt_boxes):
"""Transforms the ground truth boxes into targets for training"""
box_target = tf.concat(
[
(matched_gt_boxes[:, :2] - anchor_boxes[:, :2]) / anchor_boxes[:, 2:],
tf.math.log(matched_gt_boxes[:, 2:] / anchor_boxes[:, 2:]),
],
axis=-1,
)
box_target = box_target / self._box_variance
return box_target
def _encode_sample(self, image_shape, gt_boxes, cls_ids):
"""Creates box and classification targets for a single sample"""
anchor_boxes = self._anchor_box.get_anchors(image_shape[1], image_shape[2])
cls_ids = tf.cast(cls_ids, dtype=tf.float32)
matched_gt_idx, positive_mask, ignore_mask = self._match_anchor_boxes(
anchor_boxes, gt_boxes
)
matched_gt_boxes = tf.gather(gt_boxes, matched_gt_idx)
box_target = self._compute_box_target(anchor_boxes, matched_gt_boxes)
matched_gt_cls_ids = tf.gather(cls_ids, matched_gt_idx)
cls_target = tf.where(
tf.not_equal(positive_mask, 1.0), -1.0, matched_gt_cls_ids
)
cls_target = tf.where(tf.equal(ignore_mask, 1.0), -2.0, cls_target)
cls_target = tf.expand_dims(cls_target, axis=-1)
label = tf.concat([box_target, cls_target], axis=-1)
return label
def encode_batch(self, batch_images, gt_boxes, cls_ids):
"""Creates box and classification targets for a batch"""
images_shape = tf.shape(batch_images)
batch_size = images_shape[0]
labels = tf.TensorArray(dtype=tf.float32, size=batch_size, dynamic_size=True)
for i in range(batch_size):
label = self._encode_sample(images_shape, gt_boxes[i], cls_ids[i])
labels = labels.write(i, label)
batch_images = tf.keras.applications.resnet.preprocess_input(batch_images)
return batch_images, labels.stack()
构建 ResNet50 主干网络
RetinaNet 使用基于 ResNet 的主干网络,并在此基础上构建特征金字塔网络。在本示例中,我们使用 ResNet50 作为主干网络,并返回步长为 8、16 和 32 的特征图。
def get_backbone():
"""Builds ResNet50 with pre-trained imagenet weights"""
backbone = keras.applications.ResNet50(
include_top=False, input_shape=[None, None, 3]
)
c3_output, c4_output, c5_output = [
backbone.get_layer(layer_name).output
for layer_name in ["conv3_block4_out", "conv4_block6_out", "conv5_block3_out"]
]
return keras.Model(
inputs=[backbone.inputs], outputs=[c3_output, c4_output, c5_output]
)
构建 Feature Pyramid Network 作为自定义层
class FeaturePyramid(keras.layers.Layer):
"""Builds the Feature Pyramid with the feature maps from the backbone.
Attributes:
num_classes: Number of classes in the dataset.
backbone: The backbone to build the feature pyramid from.
Currently supports ResNet50 only.
"""
def __init__(self, backbone=None, **kwargs):
super().__init__(name="FeaturePyramid", **kwargs)
self.backbone = backbone if backbone else get_backbone()
self.conv_c3_1x1 = keras.layers.Conv2D(256, 1, 1, "same")
self.conv_c4_1x1 = keras.layers.Conv2D(256, 1, 1, "same")
self.conv_c5_1x1 = keras.layers.Conv2D(256, 1, 1, "same")
self.conv_c3_3x3 = keras.layers.Conv2D(256, 3, 1, "same")
self.conv_c4_3x3 = keras.layers.Conv2D(256, 3, 1, "same")
self.conv_c5_3x3 = keras.layers.Conv2D(256, 3, 1, "same")
self.conv_c6_3x3 = keras.layers.Conv2D(256, 3, 2, "same")
self.conv_c7_3x3 = keras.layers.Conv2D(256, 3, 2, "same")
self.upsample_2x = keras.layers.UpSampling2D(2)
def call(self, images, training=False):
c3_output, c4_output, c5_output = self.backbone(images, training=training)
p3_output = self.conv_c3_1x1(c3_output)
p4_output = self.conv_c4_1x1(c4_output)
p5_output = self.conv_c5_1x1(c5_output)
p4_output = p4_output + self.upsample_2x(p5_output)
p3_output = p3_output + self.upsample_2x(p4_output)
p3_output = self.conv_c3_3x3(p3_output)
p4_output = self.conv_c4_3x3(p4_output)
p5_output = self.conv_c5_3x3(p5_output)
p6_output = self.conv_c6_3x3(c5_output)
p7_output = self.conv_c7_3x3(tf.nn.relu(p6_output))
return p3_output, p4_output, p5_output, p6_output, p7_output
构建分类和边界框回归头部。
RetinaNet 模型具有独立的边界框回归头部和预测对象类别概率的头部。这些头部在特征金字塔的所有特征图之间共享。
def build_head(output_filters, bias_init):
"""Builds the class/box predictions head.
Arguments:
output_filters: Number of convolution filters in the final layer.
bias_init: Bias Initializer for the final convolution layer.
Returns:
A keras sequential model representing either the classification
or the box regression head depending on `output_filters`.
"""
head = keras.Sequential([keras.Input(shape=[None, None, 256])])
kernel_init = tf.initializers.RandomNormal(0.0, 0.01)
for _ in range(4):
head.add(
keras.layers.Conv2D(256, 3, padding="same", kernel_initializer=kernel_init)
)
head.add(keras.layers.ReLU())
head.add(
keras.layers.Conv2D(
output_filters,
3,
1,
padding="same",
kernel_initializer=kernel_init,
bias_initializer=bias_init,
)
)
return head
使用子类化模型构建 RetinaNet
class RetinaNet(keras.Model):
"""A subclassed Keras model implementing the RetinaNet architecture.
Attributes:
num_classes: Number of classes in the dataset.
backbone: The backbone to build the feature pyramid from.
Currently supports ResNet50 only.
"""
def __init__(self, num_classes, backbone=None, **kwargs):
super().__init__(name="RetinaNet", **kwargs)
self.fpn = FeaturePyramid(backbone)
self.num_classes = num_classes
prior_probability = tf.constant_initializer(-np.log((1 - 0.01) / 0.01))
self.cls_head = build_head(9 * num_classes, prior_probability)
self.box_head = build_head(9 * 4, "zeros")
def call(self, image, training=False):
features = self.fpn(image, training=training)
N = tf.shape(image)[0]
cls_outputs = []
box_outputs = []
for feature in features:
box_outputs.append(tf.reshape(self.box_head(feature), [N, -1, 4]))
cls_outputs.append(
tf.reshape(self.cls_head(feature), [N, -1, self.num_classes])
)
cls_outputs = tf.concat(cls_outputs, axis=1)
box_outputs = tf.concat(box_outputs, axis=1)
return tf.concat([box_outputs, cls_outputs], axis=-1)
实现用于解码预测的自定义层
class DecodePredictions(tf.keras.layers.Layer):
"""A Keras layer that decodes predictions of the RetinaNet model.
Attributes:
num_classes: Number of classes in the dataset
confidence_threshold: Minimum class probability, below which detections
are pruned.
nms_iou_threshold: IOU threshold for the NMS operation
max_detections_per_class: Maximum number of detections to retain per
class.
max_detections: Maximum number of detections to retain across all
classes.
box_variance: The scaling factors used to scale the bounding box
predictions.
"""
def __init__(
self,
num_classes=80,
confidence_threshold=0.05,
nms_iou_threshold=0.5,
max_detections_per_class=100,
max_detections=100,
box_variance=[0.1, 0.1, 0.2, 0.2],
**kwargs
):
super().__init__(**kwargs)
self.num_classes = num_classes
self.confidence_threshold = confidence_threshold
self.nms_iou_threshold = nms_iou_threshold
self.max_detections_per_class = max_detections_per_class
self.max_detections = max_detections
self._anchor_box = AnchorBox()
self._box_variance = tf.convert_to_tensor(
[0.1, 0.1, 0.2, 0.2], dtype=tf.float32
)
def _decode_box_predictions(self, anchor_boxes, box_predictions):
boxes = box_predictions * self._box_variance
boxes = tf.concat(
[
boxes[:, :, :2] * anchor_boxes[:, :, 2:] + anchor_boxes[:, :, :2],
tf.math.exp(boxes[:, :, 2:]) * anchor_boxes[:, :, 2:],
],
axis=-1,
)
boxes_transformed = convert_to_corners(boxes)
return boxes_transformed
def call(self, images, predictions):
image_shape = tf.cast(tf.shape(images), dtype=tf.float32)
anchor_boxes = self._anchor_box.get_anchors(image_shape[1], image_shape[2])
box_predictions = predictions[:, :, :4]
cls_predictions = tf.nn.sigmoid(predictions[:, :, 4:])
boxes = self._decode_box_predictions(anchor_boxes[None, ...], box_predictions)
return tf.image.combined_non_max_suppression(
tf.expand_dims(boxes, axis=2),
cls_predictions,
self.max_detections_per_class,
self.max_detections,
self.nms_iou_threshold,
self.confidence_threshold,
clip_boxes=False,
)
实现 Smooth L1 loss 和 Focal Loss 作为 Keras 自定义损失函数
class RetinaNetBoxLoss(tf.losses.Loss):
"""Implements Smooth L1 loss"""
def __init__(self, delta):
super().__init__(
reduction="none", name="RetinaNetBoxLoss"
)
self._delta = delta
def call(self, y_true, y_pred):
difference = y_true - y_pred
absolute_difference = tf.abs(difference)
squared_difference = difference ** 2
loss = tf.where(
tf.less(absolute_difference, self._delta),
0.5 * squared_difference,
absolute_difference - 0.5,
)
return tf.reduce_sum(loss, axis=-1)
class RetinaNetClassificationLoss(tf.losses.Loss):
"""Implements Focal loss"""
def __init__(self, alpha, gamma):
super().__init__(
reduction="none", name="RetinaNetClassificationLoss"
)
self._alpha = alpha
self._gamma = gamma
def call(self, y_true, y_pred):
cross_entropy = tf.nn.sigmoid_cross_entropy_with_logits(
labels=y_true, logits=y_pred
)
probs = tf.nn.sigmoid(y_pred)
alpha = tf.where(tf.equal(y_true, 1.0), self._alpha, (1.0 - self._alpha))
pt = tf.where(tf.equal(y_true, 1.0), probs, 1 - probs)
loss = alpha * tf.pow(1.0 - pt, self._gamma) * cross_entropy
return tf.reduce_sum(loss, axis=-1)
class RetinaNetLoss(tf.losses.Loss):
"""Wrapper to combine both the losses"""
def __init__(self, num_classes=80, alpha=0.25, gamma=2.0, delta=1.0):
super().__init__(reduction="auto", name="RetinaNetLoss")
self._clf_loss = RetinaNetClassificationLoss(alpha, gamma)
self._box_loss = RetinaNetBoxLoss(delta)
self._num_classes = num_classes
def call(self, y_true, y_pred):
y_pred = tf.cast(y_pred, dtype=tf.float32)
box_labels = y_true[:, :, :4]
box_predictions = y_pred[:, :, :4]
cls_labels = tf.one_hot(
tf.cast(y_true[:, :, 4], dtype=tf.int32),
depth=self._num_classes,
dtype=tf.float32,
)
cls_predictions = y_pred[:, :, 4:]
positive_mask = tf.cast(tf.greater(y_true[:, :, 4], -1.0), dtype=tf.float32)
ignore_mask = tf.cast(tf.equal(y_true[:, :, 4], -2.0), dtype=tf.float32)
clf_loss = self._clf_loss(cls_labels, cls_predictions)
box_loss = self._box_loss(box_labels, box_predictions)
clf_loss = tf.where(tf.equal(ignore_mask, 1.0), 0.0, clf_loss)
box_loss = tf.where(tf.equal(positive_mask, 1.0), box_loss, 0.0)
normalizer = tf.reduce_sum(positive_mask, axis=-1)
clf_loss = tf.math.divide_no_nan(tf.reduce_sum(clf_loss, axis=-1), normalizer)
box_loss = tf.math.divide_no_nan(tf.reduce_sum(box_loss, axis=-1), normalizer)
loss = clf_loss + box_loss
return loss
设置训练参数
model_dir = "retinanet/"
label_encoder = LabelEncoder()
num_classes = 80
batch_size = 2
learning_rates = [2.5e-06, 0.000625, 0.00125, 0.0025, 0.00025, 2.5e-05]
learning_rate_boundaries = [125, 250, 500, 240000, 360000]
learning_rate_fn = tf.optimizers.schedules.PiecewiseConstantDecay(
boundaries=learning_rate_boundaries, values=learning_rates
)
初始化和编译模型
resnet50_backbone = get_backbone()
loss_fn = RetinaNetLoss(num_classes)
model = RetinaNet(num_classes, resnet50_backbone)
optimizer = tf.keras.optimizers.legacy.SGD(learning_rate=learning_rate_fn, momentum=0.9)
model.compile(loss=loss_fn, optimizer=optimizer)
Downloading data from https://storage.googleapis.com/tensorflow/keras-applications/resnet/resnet50_weights_tf_dim_ordering_tf_kernels_notop.h5
94773248/94765736 [==============================] - 0s 0us/step
94781440/94765736 [==============================] - 0s 0us/step
设置回调
callbacks_list = [
tf.keras.callbacks.ModelCheckpoint(
filepath=os.path.join(model_dir, "weights" + "_epoch_{epoch}"),
monitor="loss",
save_best_only=False,
save_weights_only=True,
verbose=1,
)
]
使用 TensorFlow Datasets 加载 COCO2017 数据集
# set `data_dir=None` to load the complete dataset
(train_dataset, val_dataset), dataset_info = tfds.load(
"coco/2017", split=["train", "validation"], with_info=True, data_dir="data"
)
设置一个 tf.data 数据管道
为了确保模型能够高效地获取数据,我们将使用 tf.data API 创建输入管道。输入管道包括以下主要处理步骤
- 将预处理函数应用于样本
- 创建具有固定 batch size 的批次。由于 batch 中的图像可以具有不同的尺寸,并且可以具有不同数量的对象,我们使用
padded_batch添加必要的填充以创建矩形张量 - 使用
LabelEncoder为 batch 中的每个样本创建目标
autotune = tf.data.AUTOTUNE
train_dataset = train_dataset.map(preprocess_data, num_parallel_calls=autotune)
train_dataset = train_dataset.shuffle(8 * batch_size)
train_dataset = train_dataset.padded_batch(
batch_size=batch_size, padding_values=(0.0, 1e-8, -1), drop_remainder=True
)
train_dataset = train_dataset.map(
label_encoder.encode_batch, num_parallel_calls=autotune
)
train_dataset = train_dataset.apply(tf.data.experimental.ignore_errors())
train_dataset = train_dataset.prefetch(autotune)
val_dataset = val_dataset.map(preprocess_data, num_parallel_calls=autotune)
val_dataset = val_dataset.padded_batch(
batch_size=1, padding_values=(0.0, 1e-8, -1), drop_remainder=True
)
val_dataset = val_dataset.map(label_encoder.encode_batch, num_parallel_calls=autotune)
val_dataset = val_dataset.apply(tf.data.experimental.ignore_errors())
val_dataset = val_dataset.prefetch(autotune)
训练模型
# Uncomment the following lines, when training on full dataset
# train_steps_per_epoch = dataset_info.splits["train"].num_examples // batch_size
# val_steps_per_epoch = \
# dataset_info.splits["validation"].num_examples // batch_size
# train_steps = 4 * 100000
# epochs = train_steps // train_steps_per_epoch
epochs = 1
# Running 100 training and 50 validation steps,
# remove `.take` when training on the full dataset
model.fit(
train_dataset.take(100),
validation_data=val_dataset.take(50),
epochs=epochs,
callbacks=callbacks_list,
verbose=1,
)
100/Unknown - 290s 3s/step - loss: 4.0817
Epoch 1: saving model to retinanet/weights_epoch_1
100/100 [==============================] - 336s 3s/step - loss: 4.0817 - val_loss: 4.1082
<keras.callbacks.History at 0x7f4c7e0428d0>
加载权重
# Change this to `model_dir` when not using the downloaded weights
weights_dir = "data"
latest_checkpoint = tf.train.latest_checkpoint(weights_dir)
model.load_weights(latest_checkpoint)
<tensorflow.python.training.tracking.util.CheckpointLoadStatus at 0x7f4c6823d0d0>
构建推理模型
image = tf.keras.Input(shape=[None, None, 3], name="image")
predictions = model(image, training=False)
detections = DecodePredictions(confidence_threshold=0.5)(image, predictions)
inference_model = tf.keras.Model(inputs=image, outputs=detections)
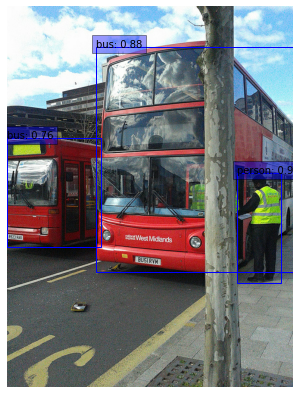
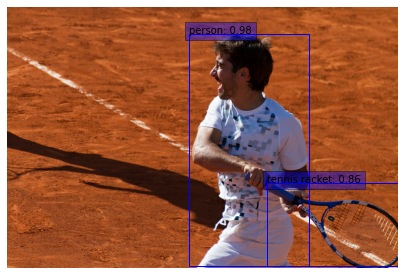
生成检测结果
def prepare_image(image):
image, _, ratio = resize_and_pad_image(image, jitter=None)
image = tf.keras.applications.resnet.preprocess_input(image)
return tf.expand_dims(image, axis=0), ratio
val_dataset = tfds.load("coco/2017", split="validation", data_dir="data")
int2str = dataset_info.features["objects"]["label"].int2str
for sample in val_dataset.take(2):
image = tf.cast(sample["image"], dtype=tf.float32)
input_image, ratio = prepare_image(image)
detections = inference_model.predict(input_image)
num_detections = detections.valid_detections[0]
class_names = [
int2str(int(x)) for x in detections.nmsed_classes[0][:num_detections]
]
visualize_detections(
image,
detections.nmsed_boxes[0][:num_detections] / ratio,
class_names,
detections.nmsed_scores[0][:num_detections],
)
示例可在 HuggingFace 上获取。
| 训练好的模型 | 演示 |
|---|---|