RetinaNet 目标检测
作者: Srihari Humbarwadi
创建日期 2020/05/17
最后修改日期 2023/07/10
描述: 实现 RetinaNet:用于密集目标检测的 Focal Loss。

简介
目标检测是计算机视觉中一个非常重要的问题。在这里,模型负责定位图像中的对象,并同时将其分类到不同的类别。目标检测模型可以大致分为“单阶段”和“两阶段”检测器。两阶段检测器通常更准确,但速度较慢。在本例中,我们将实现 RetinaNet,这是一个流行的单阶段检测器,它既准确又快速。RetinaNet 使用特征金字塔网络来高效地检测多尺度的对象,并引入了一种新的损失函数——Focal loss——来缓解前景-背景类别极度不平衡的问题。
参考文献
import os
import re
import zipfile
import numpy as np
import tensorflow as tf
from tensorflow import keras
import matplotlib.pyplot as plt
import tensorflow_datasets as tfds
下载 COCO2017 数据集
在拥有约 118k 图像的整个 COCO2017 数据集上进行训练需要很长时间,因此在本例中我们将使用一个包含约 500 张图像的小型子集进行训练。
url = "https://github.com/srihari-humbarwadi/datasets/releases/download/v0.1.0/data.zip"
filename = os.path.join(os.getcwd(), "data.zip")
keras.utils.get_file(filename, url)
with zipfile.ZipFile("data.zip", "r") as z_fp:
z_fp.extractall("./")
Downloading data from https://github.com/srihari-humbarwadi/datasets/releases/download/v0.1.0/data.zip
560529408/560525318 [==============================] - 7s 0us/step
560537600/560525318 [==============================] - 7s 0us/step
实现辅助函数
边界框可以用多种方式表示,最常见的格式是
- 存储角点坐标
[xmin, ymin, xmax, ymax] - 存储中心点坐标和框的尺寸
[x, y, width, height]
由于我们需要这两种格式,我们将实现函数来在它们之间进行转换。
def swap_xy(boxes):
"""Swaps order the of x and y coordinates of the boxes.
Arguments:
boxes: A tensor with shape `(num_boxes, 4)` representing bounding boxes.
Returns:
swapped boxes with shape same as that of boxes.
"""
return tf.stack([boxes[:, 1], boxes[:, 0], boxes[:, 3], boxes[:, 2]], axis=-1)
def convert_to_xywh(boxes):
"""Changes the box format to center, width and height.
Arguments:
boxes: A tensor of rank 2 or higher with a shape of `(..., num_boxes, 4)`
representing bounding boxes where each box is of the format
`[xmin, ymin, xmax, ymax]`.
Returns:
converted boxes with shape same as that of boxes.
"""
return tf.concat(
[(boxes[..., :2] + boxes[..., 2:]) / 2.0, boxes[..., 2:] - boxes[..., :2]],
axis=-1,
)
def convert_to_corners(boxes):
"""Changes the box format to corner coordinates
Arguments:
boxes: A tensor of rank 2 or higher with a shape of `(..., num_boxes, 4)`
representing bounding boxes where each box is of the format
`[x, y, width, height]`.
Returns:
converted boxes with shape same as that of boxes.
"""
return tf.concat(
[boxes[..., :2] - boxes[..., 2:] / 2.0, boxes[..., :2] + boxes[..., 2:] / 2.0],
axis=-1,
)
计算成对交并比 (IOU)
正如我们稍后将在示例中看到的,我们将根据重叠程度将地面真实框分配给锚框。这将需要我们计算所有锚框和地面真实框对之间的交并比 (IOU)。
def compute_iou(boxes1, boxes2):
"""Computes pairwise IOU matrix for given two sets of boxes
Arguments:
boxes1: A tensor with shape `(N, 4)` representing bounding boxes
where each box is of the format `[x, y, width, height]`.
boxes2: A tensor with shape `(M, 4)` representing bounding boxes
where each box is of the format `[x, y, width, height]`.
Returns:
pairwise IOU matrix with shape `(N, M)`, where the value at ith row
jth column holds the IOU between ith box and jth box from
boxes1 and boxes2 respectively.
"""
boxes1_corners = convert_to_corners(boxes1)
boxes2_corners = convert_to_corners(boxes2)
lu = tf.maximum(boxes1_corners[:, None, :2], boxes2_corners[:, :2])
rd = tf.minimum(boxes1_corners[:, None, 2:], boxes2_corners[:, 2:])
intersection = tf.maximum(0.0, rd - lu)
intersection_area = intersection[:, :, 0] * intersection[:, :, 1]
boxes1_area = boxes1[:, 2] * boxes1[:, 3]
boxes2_area = boxes2[:, 2] * boxes2[:, 3]
union_area = tf.maximum(
boxes1_area[:, None] + boxes2_area - intersection_area, 1e-8
)
return tf.clip_by_value(intersection_area / union_area, 0.0, 1.0)
def visualize_detections(
image, boxes, classes, scores, figsize=(7, 7), linewidth=1, color=[0, 0, 1]
):
"""Visualize Detections"""
image = np.array(image, dtype=np.uint8)
plt.figure(figsize=figsize)
plt.axis("off")
plt.imshow(image)
ax = plt.gca()
for box, _cls, score in zip(boxes, classes, scores):
text = "{}: {:.2f}".format(_cls, score)
x1, y1, x2, y2 = box
w, h = x2 - x1, y2 - y1
patch = plt.Rectangle(
[x1, y1], w, h, fill=False, edgecolor=color, linewidth=linewidth
)
ax.add_patch(patch)
ax.text(
x1,
y1,
text,
bbox={"facecolor": color, "alpha": 0.4},
clip_box=ax.clipbox,
clip_on=True,
)
plt.show()
return ax
实现锚框生成器
锚框是模型用于预测对象边界框的固定大小的框。它通过回归对象中心位置与锚框中心位置之间的偏移量来做到这一点,然后使用锚框的宽度和高度来预测对象的相对尺度。在 RetinaNet 的情况下,给定特征图上的每个位置都有九个锚框(在三个尺度和三个比例下)。
class AnchorBox:
"""Generates anchor boxes.
This class has operations to generate anchor boxes for feature maps at
strides `[8, 16, 32, 64, 128]`. Where each anchor each box is of the
format `[x, y, width, height]`.
Attributes:
aspect_ratios: A list of float values representing the aspect ratios of
the anchor boxes at each location on the feature map
scales: A list of float values representing the scale of the anchor boxes
at each location on the feature map.
num_anchors: The number of anchor boxes at each location on feature map
areas: A list of float values representing the areas of the anchor
boxes for each feature map in the feature pyramid.
strides: A list of float value representing the strides for each feature
map in the feature pyramid.
"""
def __init__(self):
self.aspect_ratios = [0.5, 1.0, 2.0]
self.scales = [2 ** x for x in [0, 1 / 3, 2 / 3]]
self._num_anchors = len(self.aspect_ratios) * len(self.scales)
self._strides = [2 ** i for i in range(3, 8)]
self._areas = [x ** 2 for x in [32.0, 64.0, 128.0, 256.0, 512.0]]
self._anchor_dims = self._compute_dims()
def _compute_dims(self):
"""Computes anchor box dimensions for all ratios and scales at all levels
of the feature pyramid.
"""
anchor_dims_all = []
for area in self._areas:
anchor_dims = []
for ratio in self.aspect_ratios:
anchor_height = tf.math.sqrt(area / ratio)
anchor_width = area / anchor_height
dims = tf.reshape(
tf.stack([anchor_width, anchor_height], axis=-1), [1, 1, 2]
)
for scale in self.scales:
anchor_dims.append(scale * dims)
anchor_dims_all.append(tf.stack(anchor_dims, axis=-2))
return anchor_dims_all
def _get_anchors(self, feature_height, feature_width, level):
"""Generates anchor boxes for a given feature map size and level
Arguments:
feature_height: An integer representing the height of the feature map.
feature_width: An integer representing the width of the feature map.
level: An integer representing the level of the feature map in the
feature pyramid.
Returns:
anchor boxes with the shape
`(feature_height * feature_width * num_anchors, 4)`
"""
rx = tf.range(feature_width, dtype=tf.float32) + 0.5
ry = tf.range(feature_height, dtype=tf.float32) + 0.5
centers = tf.stack(tf.meshgrid(rx, ry), axis=-1) * self._strides[level - 3]
centers = tf.expand_dims(centers, axis=-2)
centers = tf.tile(centers, [1, 1, self._num_anchors, 1])
dims = tf.tile(
self._anchor_dims[level - 3], [feature_height, feature_width, 1, 1]
)
anchors = tf.concat([centers, dims], axis=-1)
return tf.reshape(
anchors, [feature_height * feature_width * self._num_anchors, 4]
)
def get_anchors(self, image_height, image_width):
"""Generates anchor boxes for all the feature maps of the feature pyramid.
Arguments:
image_height: Height of the input image.
image_width: Width of the input image.
Returns:
anchor boxes for all the feature maps, stacked as a single tensor
with shape `(total_anchors, 4)`
"""
anchors = [
self._get_anchors(
tf.math.ceil(image_height / 2 ** i),
tf.math.ceil(image_width / 2 ** i),
i,
)
for i in range(3, 8)
]
return tf.concat(anchors, axis=0)
预处理数据
图像预处理包括两个步骤
- 调整图像大小:将图像调整为最短边等于 800 像素,调整后如果图像最长边超过 1333 像素,则将图像调整为最长边限制在 1333 像素。
- 应用增强:随机尺度抖动和随机水平翻转是应用于图像的唯一增强方法。
除了图像,边界框也会根据需要进行重新缩放和翻转。
def random_flip_horizontal(image, boxes):
"""Flips image and boxes horizontally with 50% chance
Arguments:
image: A 3-D tensor of shape `(height, width, channels)` representing an
image.
boxes: A tensor with shape `(num_boxes, 4)` representing bounding boxes,
having normalized coordinates.
Returns:
Randomly flipped image and boxes
"""
if tf.random.uniform(()) > 0.5:
image = tf.image.flip_left_right(image)
boxes = tf.stack(
[1 - boxes[:, 2], boxes[:, 1], 1 - boxes[:, 0], boxes[:, 3]], axis=-1
)
return image, boxes
def resize_and_pad_image(
image, min_side=800.0, max_side=1333.0, jitter=[640, 1024], stride=128.0
):
"""Resizes and pads image while preserving aspect ratio.
1. Resizes images so that the shorter side is equal to `min_side`
2. If the longer side is greater than `max_side`, then resize the image
with longer side equal to `max_side`
3. Pad with zeros on right and bottom to make the image shape divisible by
`stride`
Arguments:
image: A 3-D tensor of shape `(height, width, channels)` representing an
image.
min_side: The shorter side of the image is resized to this value, if
`jitter` is set to None.
max_side: If the longer side of the image exceeds this value after
resizing, the image is resized such that the longer side now equals to
this value.
jitter: A list of floats containing minimum and maximum size for scale
jittering. If available, the shorter side of the image will be
resized to a random value in this range.
stride: The stride of the smallest feature map in the feature pyramid.
Can be calculated using `image_size / feature_map_size`.
Returns:
image: Resized and padded image.
image_shape: Shape of the image before padding.
ratio: The scaling factor used to resize the image
"""
image_shape = tf.cast(tf.shape(image)[:2], dtype=tf.float32)
if jitter is not None:
min_side = tf.random.uniform((), jitter[0], jitter[1], dtype=tf.float32)
ratio = min_side / tf.reduce_min(image_shape)
if ratio * tf.reduce_max(image_shape) > max_side:
ratio = max_side / tf.reduce_max(image_shape)
image_shape = ratio * image_shape
image = tf.image.resize(image, tf.cast(image_shape, dtype=tf.int32))
padded_image_shape = tf.cast(
tf.math.ceil(image_shape / stride) * stride, dtype=tf.int32
)
image = tf.image.pad_to_bounding_box(
image, 0, 0, padded_image_shape[0], padded_image_shape[1]
)
return image, image_shape, ratio
def preprocess_data(sample):
"""Applies preprocessing step to a single sample
Arguments:
sample: A dict representing a single training sample.
Returns:
image: Resized and padded image with random horizontal flipping applied.
bbox: Bounding boxes with the shape `(num_objects, 4)` where each box is
of the format `[x, y, width, height]`.
class_id: An tensor representing the class id of the objects, having
shape `(num_objects,)`.
"""
image = sample["image"]
bbox = swap_xy(sample["objects"]["bbox"])
class_id = tf.cast(sample["objects"]["label"], dtype=tf.int32)
image, bbox = random_flip_horizontal(image, bbox)
image, image_shape, _ = resize_and_pad_image(image)
bbox = tf.stack(
[
bbox[:, 0] * image_shape[1],
bbox[:, 1] * image_shape[0],
bbox[:, 2] * image_shape[1],
bbox[:, 3] * image_shape[0],
],
axis=-1,
)
bbox = convert_to_xywh(bbox)
return image, bbox, class_id
编码标签
原始标签(包括边界框和类别 ID)需要转换为训练目标。此转换包括以下步骤:
- 为给定图像尺寸生成锚框
- 将地面真实框分配给锚框
- 未分配任何对象的锚框,根据 IOU 被分配到背景类别或被忽略
- 使用锚框生成分类和回归目标
class LabelEncoder:
"""Transforms the raw labels into targets for training.
This class has operations to generate targets for a batch of samples which
is made up of the input images, bounding boxes for the objects present and
their class ids.
Attributes:
anchor_box: Anchor box generator to encode the bounding boxes.
box_variance: The scaling factors used to scale the bounding box targets.
"""
def __init__(self):
self._anchor_box = AnchorBox()
self._box_variance = tf.convert_to_tensor(
[0.1, 0.1, 0.2, 0.2], dtype=tf.float32
)
def _match_anchor_boxes(
self, anchor_boxes, gt_boxes, match_iou=0.5, ignore_iou=0.4
):
"""Matches ground truth boxes to anchor boxes based on IOU.
1. Calculates the pairwise IOU for the M `anchor_boxes` and N `gt_boxes`
to get a `(M, N)` shaped matrix.
2. The ground truth box with the maximum IOU in each row is assigned to
the anchor box provided the IOU is greater than `match_iou`.
3. If the maximum IOU in a row is less than `ignore_iou`, the anchor
box is assigned with the background class.
4. The remaining anchor boxes that do not have any class assigned are
ignored during training.
Arguments:
anchor_boxes: A float tensor with the shape `(total_anchors, 4)`
representing all the anchor boxes for a given input image shape,
where each anchor box is of the format `[x, y, width, height]`.
gt_boxes: A float tensor with shape `(num_objects, 4)` representing
the ground truth boxes, where each box is of the format
`[x, y, width, height]`.
match_iou: A float value representing the minimum IOU threshold for
determining if a ground truth box can be assigned to an anchor box.
ignore_iou: A float value representing the IOU threshold under which
an anchor box is assigned to the background class.
Returns:
matched_gt_idx: Index of the matched object
positive_mask: A mask for anchor boxes that have been assigned ground
truth boxes.
ignore_mask: A mask for anchor boxes that need to by ignored during
training
"""
iou_matrix = compute_iou(anchor_boxes, gt_boxes)
max_iou = tf.reduce_max(iou_matrix, axis=1)
matched_gt_idx = tf.argmax(iou_matrix, axis=1)
positive_mask = tf.greater_equal(max_iou, match_iou)
negative_mask = tf.less(max_iou, ignore_iou)
ignore_mask = tf.logical_not(tf.logical_or(positive_mask, negative_mask))
return (
matched_gt_idx,
tf.cast(positive_mask, dtype=tf.float32),
tf.cast(ignore_mask, dtype=tf.float32),
)
def _compute_box_target(self, anchor_boxes, matched_gt_boxes):
"""Transforms the ground truth boxes into targets for training"""
box_target = tf.concat(
[
(matched_gt_boxes[:, :2] - anchor_boxes[:, :2]) / anchor_boxes[:, 2:],
tf.math.log(matched_gt_boxes[:, 2:] / anchor_boxes[:, 2:]),
],
axis=-1,
)
box_target = box_target / self._box_variance
return box_target
def _encode_sample(self, image_shape, gt_boxes, cls_ids):
"""Creates box and classification targets for a single sample"""
anchor_boxes = self._anchor_box.get_anchors(image_shape[1], image_shape[2])
cls_ids = tf.cast(cls_ids, dtype=tf.float32)
matched_gt_idx, positive_mask, ignore_mask = self._match_anchor_boxes(
anchor_boxes, gt_boxes
)
matched_gt_boxes = tf.gather(gt_boxes, matched_gt_idx)
box_target = self._compute_box_target(anchor_boxes, matched_gt_boxes)
matched_gt_cls_ids = tf.gather(cls_ids, matched_gt_idx)
cls_target = tf.where(
tf.not_equal(positive_mask, 1.0), -1.0, matched_gt_cls_ids
)
cls_target = tf.where(tf.equal(ignore_mask, 1.0), -2.0, cls_target)
cls_target = tf.expand_dims(cls_target, axis=-1)
label = tf.concat([box_target, cls_target], axis=-1)
return label
def encode_batch(self, batch_images, gt_boxes, cls_ids):
"""Creates box and classification targets for a batch"""
images_shape = tf.shape(batch_images)
batch_size = images_shape[0]
labels = tf.TensorArray(dtype=tf.float32, size=batch_size, dynamic_size=True)
for i in range(batch_size):
label = self._encode_sample(images_shape, gt_boxes[i], cls_ids[i])
labels = labels.write(i, label)
batch_images = tf.keras.applications.resnet.preprocess_input(batch_images)
return batch_images, labels.stack()
构建 ResNet50 主干网络
RetinaNet 使用基于 ResNet 的主干网络,并以此构建特征金字塔网络。在本例中,我们使用 ResNet50 作为主干网络,并返回步长为 8、16 和 32 的特征图。
def get_backbone():
"""Builds ResNet50 with pre-trained imagenet weights"""
backbone = keras.applications.ResNet50(
include_top=False, input_shape=[None, None, 3]
)
c3_output, c4_output, c5_output = [
backbone.get_layer(layer_name).output
for layer_name in ["conv3_block4_out", "conv4_block6_out", "conv5_block3_out"]
]
return keras.Model(
inputs=[backbone.inputs], outputs=[c3_output, c4_output, c5_output]
)
将特征金字塔网络构建为自定义层
class FeaturePyramid(keras.layers.Layer):
"""Builds the Feature Pyramid with the feature maps from the backbone.
Attributes:
num_classes: Number of classes in the dataset.
backbone: The backbone to build the feature pyramid from.
Currently supports ResNet50 only.
"""
def __init__(self, backbone=None, **kwargs):
super().__init__(name="FeaturePyramid", **kwargs)
self.backbone = backbone if backbone else get_backbone()
self.conv_c3_1x1 = keras.layers.Conv2D(256, 1, 1, "same")
self.conv_c4_1x1 = keras.layers.Conv2D(256, 1, 1, "same")
self.conv_c5_1x1 = keras.layers.Conv2D(256, 1, 1, "same")
self.conv_c3_3x3 = keras.layers.Conv2D(256, 3, 1, "same")
self.conv_c4_3x3 = keras.layers.Conv2D(256, 3, 1, "same")
self.conv_c5_3x3 = keras.layers.Conv2D(256, 3, 1, "same")
self.conv_c6_3x3 = keras.layers.Conv2D(256, 3, 2, "same")
self.conv_c7_3x3 = keras.layers.Conv2D(256, 3, 2, "same")
self.upsample_2x = keras.layers.UpSampling2D(2)
def call(self, images, training=False):
c3_output, c4_output, c5_output = self.backbone(images, training=training)
p3_output = self.conv_c3_1x1(c3_output)
p4_output = self.conv_c4_1x1(c4_output)
p5_output = self.conv_c5_1x1(c5_output)
p4_output = p4_output + self.upsample_2x(p5_output)
p3_output = p3_output + self.upsample_2x(p4_output)
p3_output = self.conv_c3_3x3(p3_output)
p4_output = self.conv_c4_3x3(p4_output)
p5_output = self.conv_c5_3x3(p5_output)
p6_output = self.conv_c6_3x3(c5_output)
p7_output = self.conv_c7_3x3(tf.nn.relu(p6_output))
return p3_output, p4_output, p5_output, p6_output, p7_output
构建分类和边界框回归头。
RetinaNet 模型具有独立的边界框回归头和用于预测对象类别概率的头。这些头在特征金字塔的所有特征图之间共享。
def build_head(output_filters, bias_init):
"""Builds the class/box predictions head.
Arguments:
output_filters: Number of convolution filters in the final layer.
bias_init: Bias Initializer for the final convolution layer.
Returns:
A keras sequential model representing either the classification
or the box regression head depending on `output_filters`.
"""
head = keras.Sequential([keras.Input(shape=[None, None, 256])])
kernel_init = tf.initializers.RandomNormal(0.0, 0.01)
for _ in range(4):
head.add(
keras.layers.Conv2D(256, 3, padding="same", kernel_initializer=kernel_init)
)
head.add(keras.layers.ReLU())
head.add(
keras.layers.Conv2D(
output_filters,
3,
1,
padding="same",
kernel_initializer=kernel_init,
bias_initializer=bias_init,
)
)
return head
使用子类化模型构建 RetinaNet
class RetinaNet(keras.Model):
"""A subclassed Keras model implementing the RetinaNet architecture.
Attributes:
num_classes: Number of classes in the dataset.
backbone: The backbone to build the feature pyramid from.
Currently supports ResNet50 only.
"""
def __init__(self, num_classes, backbone=None, **kwargs):
super().__init__(name="RetinaNet", **kwargs)
self.fpn = FeaturePyramid(backbone)
self.num_classes = num_classes
prior_probability = tf.constant_initializer(-np.log((1 - 0.01) / 0.01))
self.cls_head = build_head(9 * num_classes, prior_probability)
self.box_head = build_head(9 * 4, "zeros")
def call(self, image, training=False):
features = self.fpn(image, training=training)
N = tf.shape(image)[0]
cls_outputs = []
box_outputs = []
for feature in features:
box_outputs.append(tf.reshape(self.box_head(feature), [N, -1, 4]))
cls_outputs.append(
tf.reshape(self.cls_head(feature), [N, -1, self.num_classes])
)
cls_outputs = tf.concat(cls_outputs, axis=1)
box_outputs = tf.concat(box_outputs, axis=1)
return tf.concat([box_outputs, cls_outputs], axis=-1)
实现一个自定义层来解码预测
class DecodePredictions(tf.keras.layers.Layer):
"""A Keras layer that decodes predictions of the RetinaNet model.
Attributes:
num_classes: Number of classes in the dataset
confidence_threshold: Minimum class probability, below which detections
are pruned.
nms_iou_threshold: IOU threshold for the NMS operation
max_detections_per_class: Maximum number of detections to retain per
class.
max_detections: Maximum number of detections to retain across all
classes.
box_variance: The scaling factors used to scale the bounding box
predictions.
"""
def __init__(
self,
num_classes=80,
confidence_threshold=0.05,
nms_iou_threshold=0.5,
max_detections_per_class=100,
max_detections=100,
box_variance=[0.1, 0.1, 0.2, 0.2],
**kwargs
):
super().__init__(**kwargs)
self.num_classes = num_classes
self.confidence_threshold = confidence_threshold
self.nms_iou_threshold = nms_iou_threshold
self.max_detections_per_class = max_detections_per_class
self.max_detections = max_detections
self._anchor_box = AnchorBox()
self._box_variance = tf.convert_to_tensor(
[0.1, 0.1, 0.2, 0.2], dtype=tf.float32
)
def _decode_box_predictions(self, anchor_boxes, box_predictions):
boxes = box_predictions * self._box_variance
boxes = tf.concat(
[
boxes[:, :, :2] * anchor_boxes[:, :, 2:] + anchor_boxes[:, :, :2],
tf.math.exp(boxes[:, :, 2:]) * anchor_boxes[:, :, 2:],
],
axis=-1,
)
boxes_transformed = convert_to_corners(boxes)
return boxes_transformed
def call(self, images, predictions):
image_shape = tf.cast(tf.shape(images), dtype=tf.float32)
anchor_boxes = self._anchor_box.get_anchors(image_shape[1], image_shape[2])
box_predictions = predictions[:, :, :4]
cls_predictions = tf.nn.sigmoid(predictions[:, :, 4:])
boxes = self._decode_box_predictions(anchor_boxes[None, ...], box_predictions)
return tf.image.combined_non_max_suppression(
tf.expand_dims(boxes, axis=2),
cls_predictions,
self.max_detections_per_class,
self.max_detections,
self.nms_iou_threshold,
self.confidence_threshold,
clip_boxes=False,
)
将 Smooth L1 损失和 Focal Loss 实现为 Keras 自定义损失
class RetinaNetBoxLoss(tf.losses.Loss):
"""Implements Smooth L1 loss"""
def __init__(self, delta):
super().__init__(
reduction="none", name="RetinaNetBoxLoss"
)
self._delta = delta
def call(self, y_true, y_pred):
difference = y_true - y_pred
absolute_difference = tf.abs(difference)
squared_difference = difference ** 2
loss = tf.where(
tf.less(absolute_difference, self._delta),
0.5 * squared_difference,
absolute_difference - 0.5,
)
return tf.reduce_sum(loss, axis=-1)
class RetinaNetClassificationLoss(tf.losses.Loss):
"""Implements Focal loss"""
def __init__(self, alpha, gamma):
super().__init__(
reduction="none", name="RetinaNetClassificationLoss"
)
self._alpha = alpha
self._gamma = gamma
def call(self, y_true, y_pred):
cross_entropy = tf.nn.sigmoid_cross_entropy_with_logits(
labels=y_true, logits=y_pred
)
probs = tf.nn.sigmoid(y_pred)
alpha = tf.where(tf.equal(y_true, 1.0), self._alpha, (1.0 - self._alpha))
pt = tf.where(tf.equal(y_true, 1.0), probs, 1 - probs)
loss = alpha * tf.pow(1.0 - pt, self._gamma) * cross_entropy
return tf.reduce_sum(loss, axis=-1)
class RetinaNetLoss(tf.losses.Loss):
"""Wrapper to combine both the losses"""
def __init__(self, num_classes=80, alpha=0.25, gamma=2.0, delta=1.0):
super().__init__(reduction="auto", name="RetinaNetLoss")
self._clf_loss = RetinaNetClassificationLoss(alpha, gamma)
self._box_loss = RetinaNetBoxLoss(delta)
self._num_classes = num_classes
def call(self, y_true, y_pred):
y_pred = tf.cast(y_pred, dtype=tf.float32)
box_labels = y_true[:, :, :4]
box_predictions = y_pred[:, :, :4]
cls_labels = tf.one_hot(
tf.cast(y_true[:, :, 4], dtype=tf.int32),
depth=self._num_classes,
dtype=tf.float32,
)
cls_predictions = y_pred[:, :, 4:]
positive_mask = tf.cast(tf.greater(y_true[:, :, 4], -1.0), dtype=tf.float32)
ignore_mask = tf.cast(tf.equal(y_true[:, :, 4], -2.0), dtype=tf.float32)
clf_loss = self._clf_loss(cls_labels, cls_predictions)
box_loss = self._box_loss(box_labels, box_predictions)
clf_loss = tf.where(tf.equal(ignore_mask, 1.0), 0.0, clf_loss)
box_loss = tf.where(tf.equal(positive_mask, 1.0), box_loss, 0.0)
normalizer = tf.reduce_sum(positive_mask, axis=-1)
clf_loss = tf.math.divide_no_nan(tf.reduce_sum(clf_loss, axis=-1), normalizer)
box_loss = tf.math.divide_no_nan(tf.reduce_sum(box_loss, axis=-1), normalizer)
loss = clf_loss + box_loss
return loss
设置训练参数
model_dir = "retinanet/"
label_encoder = LabelEncoder()
num_classes = 80
batch_size = 2
learning_rates = [2.5e-06, 0.000625, 0.00125, 0.0025, 0.00025, 2.5e-05]
learning_rate_boundaries = [125, 250, 500, 240000, 360000]
learning_rate_fn = tf.optimizers.schedules.PiecewiseConstantDecay(
boundaries=learning_rate_boundaries, values=learning_rates
)
初始化和编译模型
resnet50_backbone = get_backbone()
loss_fn = RetinaNetLoss(num_classes)
model = RetinaNet(num_classes, resnet50_backbone)
optimizer = tf.keras.optimizers.legacy.SGD(learning_rate=learning_rate_fn, momentum=0.9)
model.compile(loss=loss_fn, optimizer=optimizer)
Downloading data from https://storage.googleapis.com/tensorflow/keras-applications/resnet/resnet50_weights_tf_dim_ordering_tf_kernels_notop.h5
94773248/94765736 [==============================] - 0s 0us/step
94781440/94765736 [==============================] - 0s 0us/step
设置回调
callbacks_list = [
tf.keras.callbacks.ModelCheckpoint(
filepath=os.path.join(model_dir, "weights" + "_epoch_{epoch}"),
monitor="loss",
save_best_only=False,
save_weights_only=True,
verbose=1,
)
]
使用 TensorFlow Datasets 加载 COCO2017 数据集
# set `data_dir=None` to load the complete dataset
(train_dataset, val_dataset), dataset_info = tfds.load(
"coco/2017", split=["train", "validation"], with_info=True, data_dir="data"
)
设置 tf.data 流水线
为了确保模型能够高效地接收数据,我们将使用 tf.data API 来创建我们的输入流水线。输入流水线包含以下主要处理步骤:
- 将预处理函数应用于样本
- 以固定批量大小创建批次。由于批次中的图像可能具有不同的尺寸,并且对象数量也可能不同,因此我们使用
padded_batch来添加必要的填充以创建矩形张量。 - 使用
LabelEncoder为批次中的每个样本创建目标
autotune = tf.data.AUTOTUNE
train_dataset = train_dataset.map(preprocess_data, num_parallel_calls=autotune)
train_dataset = train_dataset.shuffle(8 * batch_size)
train_dataset = train_dataset.padded_batch(
batch_size=batch_size, padding_values=(0.0, 1e-8, -1), drop_remainder=True
)
train_dataset = train_dataset.map(
label_encoder.encode_batch, num_parallel_calls=autotune
)
train_dataset = train_dataset.apply(tf.data.experimental.ignore_errors())
train_dataset = train_dataset.prefetch(autotune)
val_dataset = val_dataset.map(preprocess_data, num_parallel_calls=autotune)
val_dataset = val_dataset.padded_batch(
batch_size=1, padding_values=(0.0, 1e-8, -1), drop_remainder=True
)
val_dataset = val_dataset.map(label_encoder.encode_batch, num_parallel_calls=autotune)
val_dataset = val_dataset.apply(tf.data.experimental.ignore_errors())
val_dataset = val_dataset.prefetch(autotune)
训练模型
# Uncomment the following lines, when training on full dataset
# train_steps_per_epoch = dataset_info.splits["train"].num_examples // batch_size
# val_steps_per_epoch = \
# dataset_info.splits["validation"].num_examples // batch_size
# train_steps = 4 * 100000
# epochs = train_steps // train_steps_per_epoch
epochs = 1
# Running 100 training and 50 validation steps,
# remove `.take` when training on the full dataset
model.fit(
train_dataset.take(100),
validation_data=val_dataset.take(50),
epochs=epochs,
callbacks=callbacks_list,
verbose=1,
)
100/Unknown - 290s 3s/step - loss: 4.0817
Epoch 1: saving model to retinanet/weights_epoch_1
100/100 [==============================] - 336s 3s/step - loss: 4.0817 - val_loss: 4.1082
<keras.callbacks.History at 0x7f4c7e0428d0>
加载权重
# Change this to `model_dir` when not using the downloaded weights
weights_dir = "data"
latest_checkpoint = tf.train.latest_checkpoint(weights_dir)
model.load_weights(latest_checkpoint)
<tensorflow.python.training.tracking.util.CheckpointLoadStatus at 0x7f4c6823d0d0>
构建推理模型
image = tf.keras.Input(shape=[None, None, 3], name="image")
predictions = model(image, training=False)
detections = DecodePredictions(confidence_threshold=0.5)(image, predictions)
inference_model = tf.keras.Model(inputs=image, outputs=detections)
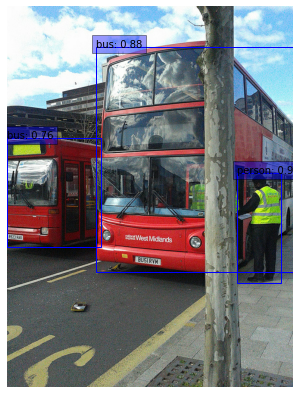
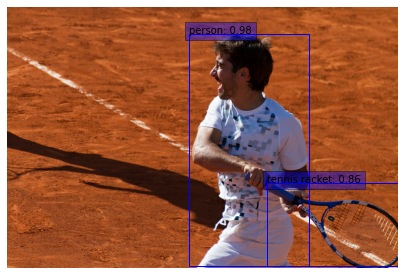
生成检测结果
def prepare_image(image):
image, _, ratio = resize_and_pad_image(image, jitter=None)
image = tf.keras.applications.resnet.preprocess_input(image)
return tf.expand_dims(image, axis=0), ratio
val_dataset = tfds.load("coco/2017", split="validation", data_dir="data")
int2str = dataset_info.features["objects"]["label"].int2str
for sample in val_dataset.take(2):
image = tf.cast(sample["image"], dtype=tf.float32)
input_image, ratio = prepare_image(image)
detections = inference_model.predict(input_image)
num_detections = detections.valid_detections[0]
class_names = [
int2str(int(x)) for x in detections.nmsed_classes[0][:num_detections]
]
visualize_detections(
image,
detections.nmsed_boxes[0][:num_detections] / ratio,
class_names,
detections.nmsed_scores[0][:num_detections],
)
示例可在 HuggingFace 上获取。
| 训练好的模型 | 演示 |
|---|---|